Spring-Mass-Dashpot System
June 13, 2019
(Book 2.1 p. 101, 2.4; video 9-10)
As in Figure 1, the Spring-Mass-Dashpot system contains a spring that can push or pull the mass in order to reach the equilibrium position. At the meanwhile, the dashpot will damp (slow down) the movement, either to the left or to the right.
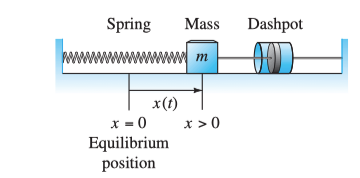
More precisely, given the mass ’s position or displacement relative to the equilibrium position , the least amount of force to make it move, by Newton’s Law, is
By Hooke’s Law, the restoringBecause a stretched spring needs to be restored to the unstretched form and vice versa force spring exerts upon the mass is proportional to the mass’s displacement:
So if (spring stretched) and if (spring compressed).
And by someone else’s law, the force dashpot exerts upon the mass is proportional to the velocity :
If these are all the forces on the mass, then we have the following system
This is a homogeneous second-order linear equation governing the free vibrations of the mass. If there’s an external force acting on mass, then it will be added to the right
This non-homogeneous equation governs the forced vibrations of the mass under the influence of the external force .
Solution Cases
We’ve discussed three cases of solutions to a second order linear DE with constant coefficients. In fact, the three cases, in this system, correspond to three physical phenomenon that is important to the DE.
Case 1: Distinct Real Roots—Overly Damped
Example:
Here we have an equation with mass , spring constant and dashpot constant . Note that . This means we have a strong dashpot that can stop/damp the oscillation brought by the spring, and why this is called overly damp. This is easy to solve with roots . Thus
Suppose the initial conditions are:
So at the start, the mass is on the right of the equilibrium position; and no velocity means we are not pushing it. Substituting these conditions we have
Note that we are not pushing the mass at the beginning. Imagine, if we push it to the right, it will still goes to the equilibrium position; if we push it to the left a lot, it will go pass the equilibrium position and go back. Check the following figure.
The red line is what we have on (6) where . If we exert a force at , to the right is the blue curve, to the left is the green curve.
Case 3: Complex Roots—Under Damped
Example:
Here and . We have a stronger spring, or equivalently weaker dashpot. This will lead to the spring dominates the movement and the mass moves back and forth. Solving this equation will give us . This leads to
Suppose we have the same initial conditions
The solution is
Here for the cosine function we have Amplitude , Circular frequency and Phase lag . Amplitude is how wide the cosine curve will be, and phase lag is how much the curve will shift to the right, or how delayed it cosine will start equal 1. is the period/time required for the object to complete one full oscillation. is the time lag.
Multiplying means we have time-varying amplitude. Since . Then (7) will never exceed .
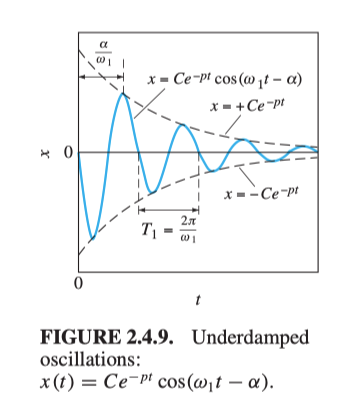
The figure illustrates this clearly.
Case 3b. Undamped
In this case, there will be no dashpot damping the movement, the damping constant . The real coefficient on will be zero and we don’t have time-varying amplitude. Example:
Solving this equation we have , then our solution will be
With same initial conditions ,
The mass will oscillates forever.
Case 2: Critically Damped
This means the damping offset the spring force equally. And we only have one root for the differential equations. This has similar graphs and physical situation as the overdamped case. They pass through the equilibrium position at most once.
Standard Form in Engineering
Often time, e.q. (4) will be written in another way to more easily express the damping situations, that is, from :
where . By quadratic formula, we express the roots as
Over damp
For the case of overly damped, we still need to solve $r=-p\pm\sqrt{p^2-\omega_0^2}$ to get explicit $r_1$ and $r_2$
Critical damp
Examine $r=-p\pm\sqrt{p^2-\omega_0^2}$, if $p=\omega_0$, then we have $p$ left and the solution will be
Underdamp - Oscillations
Examining , we get oscillations if and only if And since is the real coefficients, if there’s oscillations, the bound will be corresponding to figure 3. Recall that a complex root , will become the circular frequency, from last note. What’s here? to save the coefficients ( b/c ) . And the full solution is where deepening on the initial conditions and depending only on the ODE. As figure 3 illustrates, period $T=\displaystyle\frac{2\pi}{\omega_1}$, time lag $\delta=\displaystyle \frac{\phi}{\omega_1}$.
Undamped
No surprise is if we write the DE as (9), then if , meaning no dashpot at all, is the circular frequency and the solution is